در پست های قبلی با قاعده میسون (Mason) از درس سیستم های کنترل خطی آشنا شدید، در این پست قصد داریم که با مفهوم جدیدی به نام حساسیت آشنا شویم. حساسیت در واقع یک تعریف ریاضی است که برای بررسی میزان حساسیت یک سیستم نسبت به تغییر پارامترهایش تعریف می شود. در ادامه با مقاله تعریف تابع حساسیت همراه باشید تا به طور کامل با مفهوم حساسیت در کنترل خطی آشنا شوید.
فهرست مطالب این مقاله
تعریف تابع حساسیت در کنترل خطی
اگر P را به عنوان یک پارامتر از سیستم مورد مطالعه در نظر بگیریم، با تغییر P خروجی سیستم مورد نظر نیز تغییر خواهد کرد. برای آنکه بدانیم پارامتر P چگونه بر خروجی سیستم تاثیر می گذارد، مفهومی به نام حساسیت را تعریف می کنیم. در واقع ما در یک سیستم تغییرات خروجی ناشی از تغییر یک پارامتر را حساسیت آن سیستم نسبت به آن پارامتر تعریف می کنیم.
مفهوم ریاضی حساسیت
همانطور که بیان کردیم، حساسیت تغییرات خروجی ناشی از تغییر پارامتری مانند P از سیستم مورد مطالعه می باشد. پس اگر بخواهیم رابطه ای ریاضی برای حساسیت بیان کنیم، آن را به صورت زیر خواهیم داشت :

مقصود از و به ترتیب تغییرات نسبی T در اثر پارامتر P و تغییرات نسبی P می باشند.
مفهوم فیزیکی تابع حساسیت
اگر T را به عنوان تابع تبدیل حلقه بسته یک سیستم در نظر بگیریم، آنگاه اگر حساسیت تابع تبدیل حلقه بسته T نسبت به تغییرات P برابر یک باشد ()، یعنی اینکه تابع تبدیل حلقه بسته با پارامتر P نسبت مستقیم دارد. برای درک بهتر این موضوع به مثال زیر توجه کنید.
مثال : اگر تابع تبدیل حلقه بسته سیستمی را به صورت داشته باشیم، آنگاه حساسیت تابع تبدیل حلقه بسته را نسبت به پارامتر K محاسبه کنید.
با توجه به فرمولی که برای حساسیت تعریف کردیم، داریم که :
همانطور که مشخص است، پارامتر K با تابع تبدیل حلقه بسته نسبت مستقیم دارد، به همین دلیل حساسیت T نسبت به K، مقدار واحد به دست آمده است.
اگر حساسیت تابع تبدیل حلقه بسته T نسبت به تغییرات پارامتر P برابر با منفی یک باشد()، آنگاه می توانیم بگوئیم که تابع تبدیل حلقه بسته با آن پارامتر نسبت عکس دارد. برای درک بهتر این موضوع به مثال زیر توجه کنید.
مثال : اگر تابع تبدیل حلقه بسته یک سیستم را به صورت تعریف کرده باشیم، آنگاه حساسیت این تابع تبدیل را نسبت به تغییرات پارامتر K محاسبه کنید.
همانطور که می بینید، حساسیت تابع تبدیل حلقه بسته T نسبت به تغییرات پارامتر K، برابر با منفی یک می باشد، که این موضوع به معنای رابطه معکوس پارامتر K با تابع تبدیل حلقه بسته T می باشد.
اگر حساسیت تابع تبدیل حلقه بسته نسبت به تغییرات یک پارامتر برابر با صفر شود، این بدان معناست که یعنی آن پارامتر ارتباطی با تابع تبدیل حلقه بسته ندارد. برای درک این موضوع به مثال زیر توجه کنید.
مثال : اگر تابع تبدیل حلقه بسته یک سیستم به صورت باشد، آنگاه حساسیت این تابع را نسبت به پارامتر P بیابید.
به دلیل اینکه در تابع تبدیل داده شده هیچ اثری از پارامتر P نیست، پس حساسیت تابع تبدیل حلقه بسته نسبت به تغییرات این پارامتر برابر صفر خواهد بود. در ادامه این موضوع را اثبات خواهیم کرد.
همانطور که مشاهده کردید به دلیل اینکه شد، حساسیت تابع تبدیل حلقه بسته نسبت به تغییرات پارامتر P برابر صفر شد و این یعنی تابع تبدیل حلقه بسته ارتباطی با متغیر P ندارد.
قاعده زنجیری
بلوک دیاگرام سیستمی را مانند شکل زیر در نظر بگیرید :
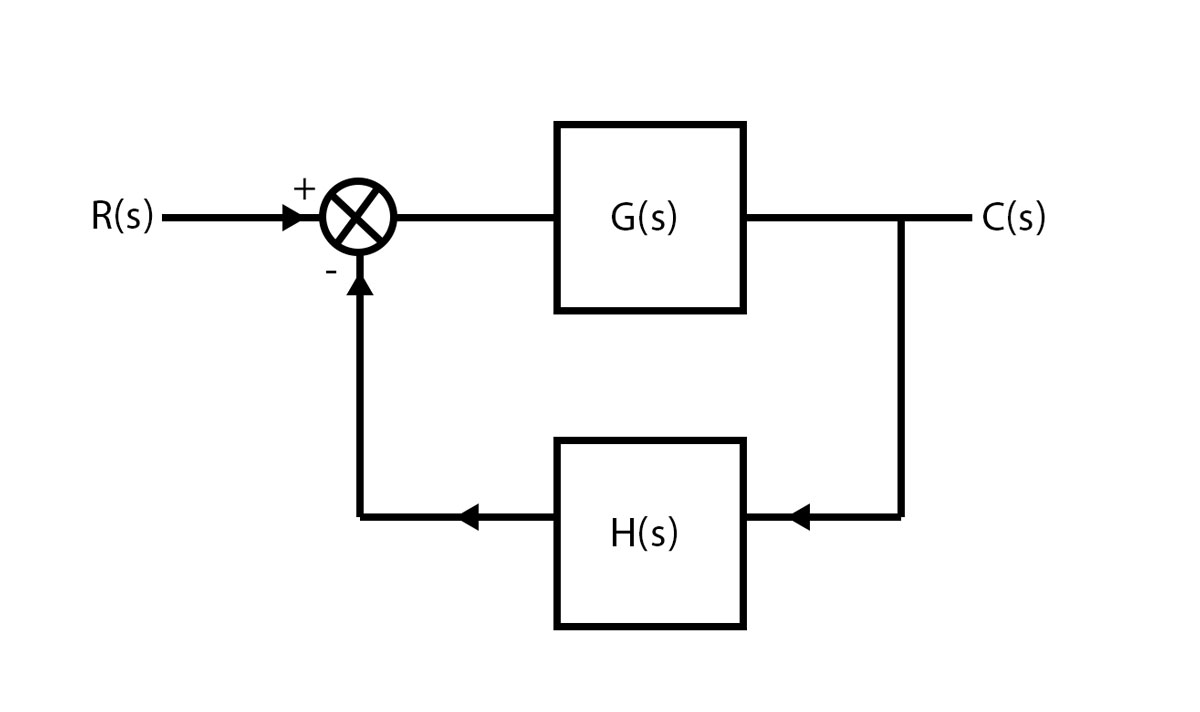
فرض کنید که سیستمی با بلوک دیاگرام داده شده را در اختیار داریم و میخواهیم حساسیت تابع تبدیل حلقه بسته را نسبت به تغییرات پارامتر P موجود در این سیستم را بدست آوریم. یکی از روش هایی که می تواند فوق العاده کمک کننده و کاهش دهنده محاسبات باشد، استفاده از قاعده زنجیری می باشد. فرمول کلی قاعده زنجیری به صورت زیر بیان می شود :
این فرمول بیان می کند، که اگر چندین مسیر پیشرو داشته باشیم و پارامتر P در آن ها موجود باشد، می توانیم حساسیت تابع تبدیل حلقه بسته را نسبت به تغییرات پارامتر P، بدون محاسبه کامل تابع تبدیل حلقه بسته و صرفاً از طریق این فرمول به دست آوریم.
بار دیگر بلوک دیاگرام داده شده در بالا را در نظر بگیرید، فرض کنید می خواهیم حساسیت تابع تبدیل حلقه بسته T را نسبت به تغییرات پارامتر P بررسی کنیم. در این صورت می توانیم فرمول قاعده زنجیری را برای این بلوک دیاگرام به صورت زیر بیان کنیم :
![]()
Feed Forward : مسیر پیشرو
Feed Back : مسیر فیدبک
حال سه حالت برای این فرمول را مورد بررسی قرار می دهیم :
حالت اول – اگر پارامتر P فقط در مسیر پیشرو قرار داشته باشد، یعنی اینکه پارامتر P در مسیر فیدبک (H) وجود نداشته باشد، آنگاه قاعده زنجیری را به شکل زیر به کار خواهیم برد.
قسمت دوم فرمول به دلیل اینکه پارامتر P در مسیر فیدبک وجود ندارد، یا به عبارت بهتر چون که H ارتباطی با پارامتر P ندارد، این مقدار برابر با صفر شده است.
حالت دوم – اگر پارامتر P فقط در مسیر فیدبک وجود داشته باشد، یعنی اینکه پارامتر P در مسیر پیشرو (G) وجود نداشته باشد. آنگاه قاعده زنجیری را به صورت زیر به کار خواهیم برد.
قسمت اول فرمول به دلیل اینکه پارامتر P در مسیر پیشرو وجود ندارد، یا به عبارت بهتر چون که G ارتباطی با پارامتر P ندارد، این مقدار برابر با صفر شده است.
حالت سوم – اگر پارامتر P هم در مسیر پیشرو و هم در مسیر فیدبک وجود داشته باشد، آنگاه می توانیم برای محاسبه حساسیت قاعده زنجیری را به صورت زیر بیان کنیم.
حال که به طور کامل با مفهوم حساسیت و قاعده زنجیری آشنا شدید، با حل یک تمرین جامع به بررسی بیشتر این موضوع می پردازیم.
تمرین : حساسیت تابع تبدیل حلقه بسته را نسبت به تغییرات پارامتر P را در سیستم زیر بدست آورید.
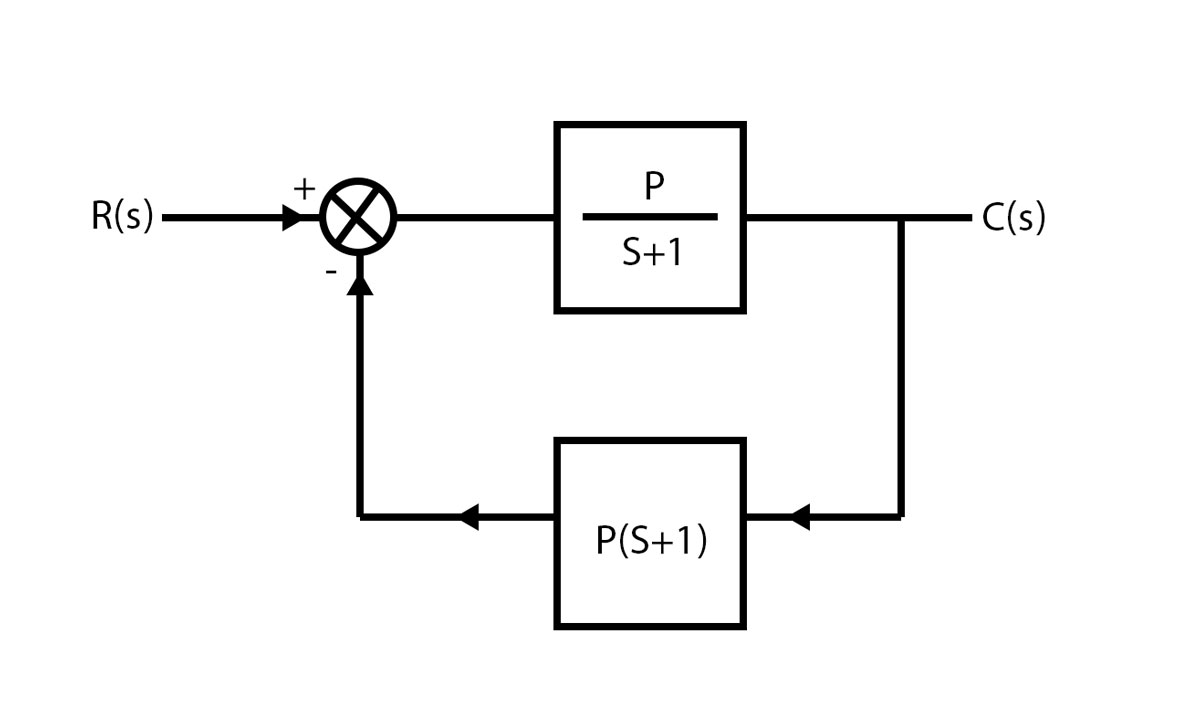
این سئوال را به دو روش حل خواهیم کرد، روش اول ابتدا با استفاده از قاعده زنجیری به حل این سئوال خواهیم پرداخت و سپس حل آن از طریق فرمول عمومی حساسیت را ارائه خواهیم کرد.
حل با استفاده از قاعده زنجیری :
همانطور که مشاهده می کنید، به دلیل اینکه متغیر P هم در مسیر پیشرو و هم مسیر فیدبک وجود دارد، فرمول قاعده زنجیری را به صورت کامل خواهیم داشت، ابتدا حساسیت تابع تبدیل حلقه بسته را نسبت به تغییرات P در مسیر پیشرو را محاسبه می کنیم، پس خواهیم داشت که :
برای محاسبه این قسمت ابتدا باید تابع تبدیل حلقه بسته را با روش میسون که در آموزش روش میسون (Mason) با آشنا شدید، بدست آوریم. اگر و در نظر بگیریم، آنگاه با استفاده از روش میسون تابع تبدیل حلقه بسته را به صورت زیر خواهیم داشت :
حال باید حساسیت تابع تبدیل حلقه بسته را نسبت به G یعنی را محاسبه کنیم.
سپس حساسیت تابع تبدیل مسیر پیشرو نسبت به تغییرات پارامتر P یعنی را محاسبه می کنیم.
حال با ضرب دو مقدار به دست آمده، حساسیت تابع تبدیل حلقه بسته نسبت به تغییرات پارامتر P در مسیر پیشرو بدست خواهد آمد.
حال حساسیت تابع تبدیل حلقه بسته را نسبت به تغییرات پارامتر P در مسیر فیدبک را محاسبه می کنیم، پس خواهیم داشت:
ابتدا حساسیت تابع تبدیل حلقه بسته را نسبت به H یعنی را محاسبه می کنیم.
حال حساسیت H نسبت به تغییرات پارامتر P یعنی را محاسبه می کنیم.
حال با ضرب دو مقدار به دست آمده، حساسیت تابع تبدیل حلقه بسته نسبت به تغییرات پارامتر P در مسیر فیدبک بدست خواهد آمد.
در آخر اگر حساسیت تابع تبدیل حلقه بسته را نسبت به تغییرات پارامتر P هم در مسیر پیشرو و هم در مسیر فیدبک نیاز داشته باشیم، کافی است که دو مقدار به دست آمده را با یکدیگر جمع کنیم.
حل با استفاده از فرمول عمومی حساسیت :
در قسمت های قبلی تابع تبدیل حلقه بسته را بدست آوردیم، حال می خواهیم با استفاده از فرمول عمومی حساسیت، حساسیت تابع تبدیل حلقه بسته را نسبت به تغییرات پارامتر P بدست آوریم. به دلیل زیاد بودن محاسبات این روش از ذکر آن ها خودداری کردیم. البته چندتا مشتق گیری ساده هست که خودتون به راحتی می تونید اون ها را انجام بدید. 🙂
امیدوارم که مقاله تعریف تابع حساسیت برای شما عزیزان مفید واقع شده باشد، هرگونه سئوال در مورد این مبحث را قسمت نظرات همین مقاله مطرح کنید.